

Google Summer of Code : Zenoh Support & Benchmarking
We’ve completed our project titled “Zenoh Support & Benchmarking”. With this project, investigated how rmw_zenoh would be used in MoveIt 2 and how rmw_zenoh would affect MoveIt’s runtime performance.
Motivation
The goal of this Google Summer of Code Project was to make rmw_zenoh_cpp available for MoveIt 2, benchmark the different midlewares such as rmw_cyclonedds and rmw_fastrtps against scenarios from complex robotic problems, ranging from trajectory planning and task planning to basic ROS works like basic topic subscription-publishing, and service-client operations. In addition we reported the found bugs to the rmw_zenoh project and implemented a CI configuration that supports testing rmw_zenoh.
rmw_zenoh comes to the fore with some exciting features like configurability with elastic topologies, supporting a lot of protocols such as TCP, UDP, making it promising in WIFI networks compared to other DDS based middlewares, even though it’s still in development phase.
Progress
Integration to Moveit 2
Initially, we couldn’t run MoveIt with rmw_zenoh due to data races inside the rmw_wait function, which brought about some problems in the Multithreaded Executor. We were able to resolve these issues in the middle of the GSoC project period, enabling MoveIt support for the rmw_zenoh middleware. With that, rmw_zenoh showed some pretty good potential with approximately the same performance as rmw_fastrtps, even if rmw_zenoh is running the TCP protocol by default. Unfortunately, there are still several issues that we found and reported, and it’s up to the community and rmw_zenoh development team to finding solutions and improvements for them.
Benchmarking
During this summer, the middleware benchmarking tool has been implemented to compare the different middlewares including rmw_zenoh, rmw_cyclonedds and rmw_fastrtps. Several scenarios have been implemented for measuring how the middlewares affects performance in typical robotics use cases. You can find the middleware benchmarking tool here: moveit_middleware_bechmark.
The implemented test scenarios include:
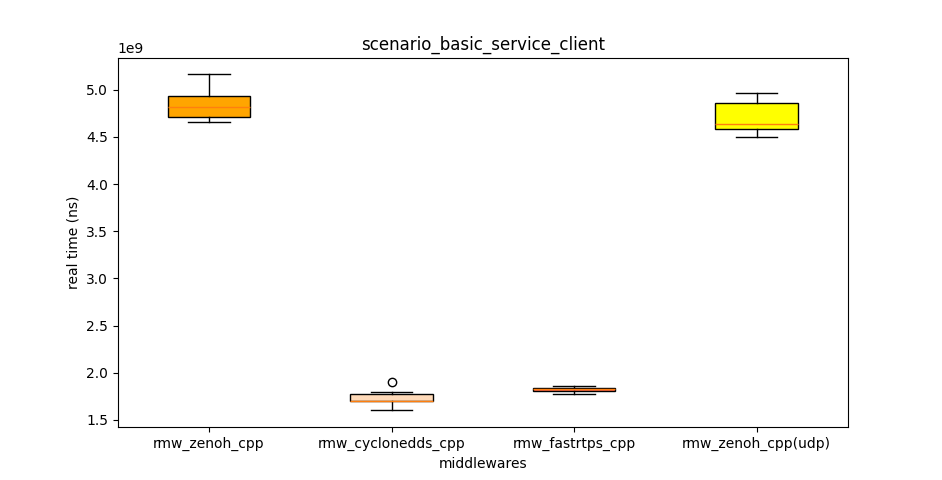
- Basic Service-Client Works
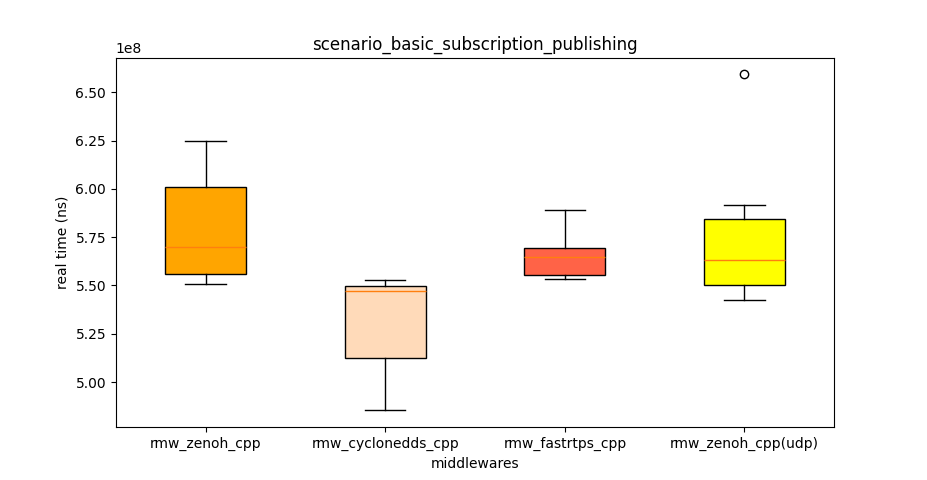
- Basic Topic Subscription-Publishing
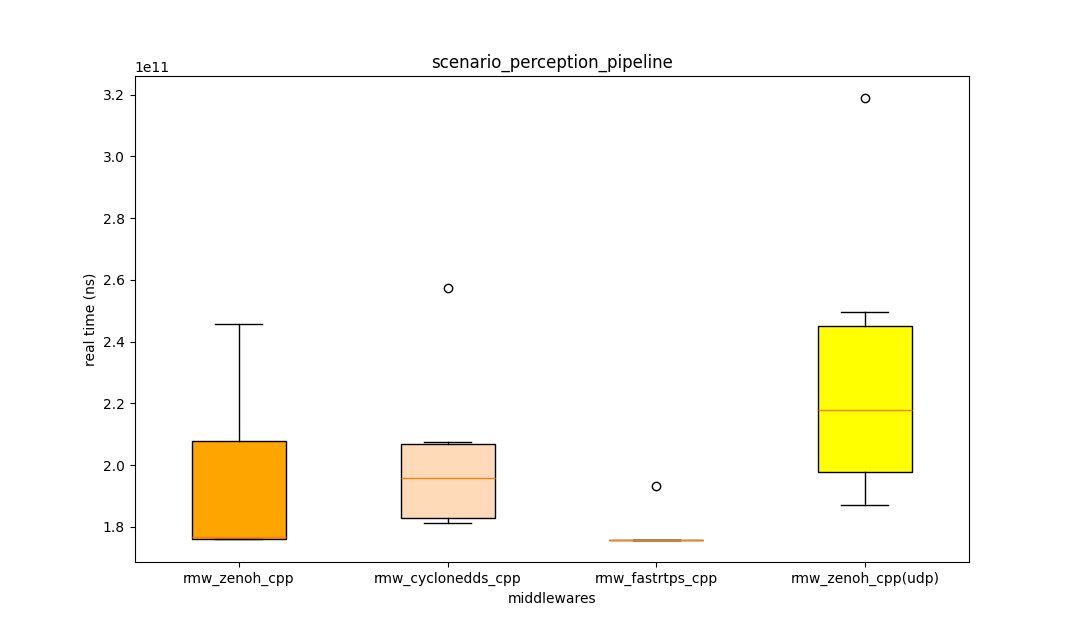
- Perception Pipeline
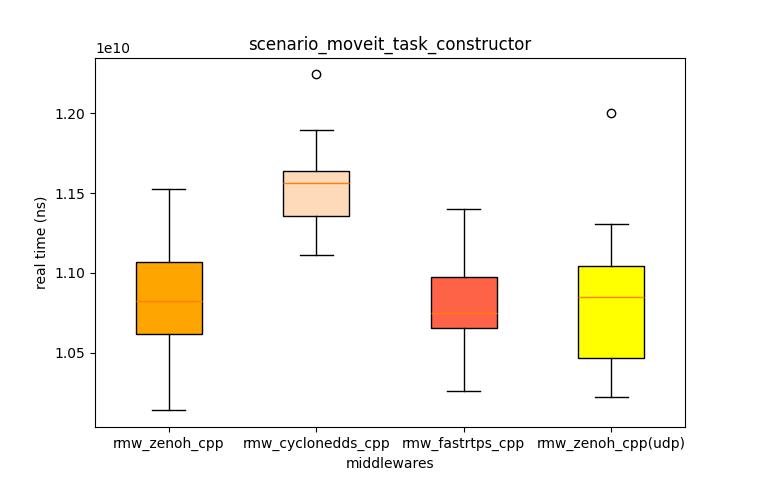
- MoveIt Task Constructor
Bugs in rmw_zenoh
Below is a list of partially unresolved issues that came up during the GSoC project work,
- https://github.com/ros2/rmw_zenoh/issues/257
- https://github.com/ros2/rmw_zenoh/issues/240
- https://github.com/ros2/rmw_zenoh/issues/251
- https://github.com/ros2/rmw_zenoh/issues/186
and our related contributions are below.
- https://github.com/ros2/rmw_zenoh/pull/252
- https://github.com/ros2/rmw_zenoh/pull/255
- https://github.com/ros2/rmw_zenoh/pull/256
Conducting Benchmarks in CI
The benchmarks have been conducted in a way to give the reliable comparisons in github-actions and exporting the metrics. Finally, the benchmarking CI system supports visualizing benchmark results as plots on a simple GitHub pages website.
Contributions to MoveIt During GSoC Project
- https://github.com/moveit/moveit2/pull/2963
- https://github.com/moveit/moveit2/pull/2834
- https://github.com/moveit/moveit2_tutorials/pull/906
- https://github.com/moveit/moveit2_tutorials/pull/944
Achievements
We have benchmarked the middlewares against various scenarios using this script and we have found below benchmark results. We have used default configurations of rmw_zenoh except the fact that we configured some tcp settings like below:
# for rmw_zenoh
sudo sysctl -w "net.ipv4.tcp_rmem=102400 102400 102400"
sudo sysctl -w "net.ipv4.tcp_wmem=102400 102400 102400"
sudo sysctl -w "net.ipv4.tcp_mem=102400 102400 102400"
# for all middlewares
sudo sysctl -w net.ipv4.udp_mem="102400 873800 16777216"
sudo sysctl -w net.core.netdev_max_backlog="30000"
sudo sysctl -w net.core.rmem_max="20971520"
sudo sysctl -w net.core.wmem_max="20971520"
sudo sysctl -w net.core.rmem_default="20971520"
sudo sysctl -w net.core.wmem_default="20971520"
Conclusion
It was an exciting progress for me. I’ve contributed a lot of open source project in this period and i’ve learnt a lot from my work and my mentors showing the way during Google Summer of Code. I strongly suggest you to join Google Summer of Code Program, especially in MoveIt organization side for those who interested in robotics. After this Google Summer of Code works, i’m willing to continue this project.
Additional
The heartfelt thank you goes to my mentors Sebastian Jahr and Henning Kayser. An other thanks goes to Julien Enoch and Zenoh Community for trying our middleware benchmark tool and giving valuable feedbacks to us. Without valuable helps of Zenoh Community, we couldn’t complete this project.